
Smarter Motion for Robots: Fast Path Planning with Kinematic Smoothing

Executive Summary
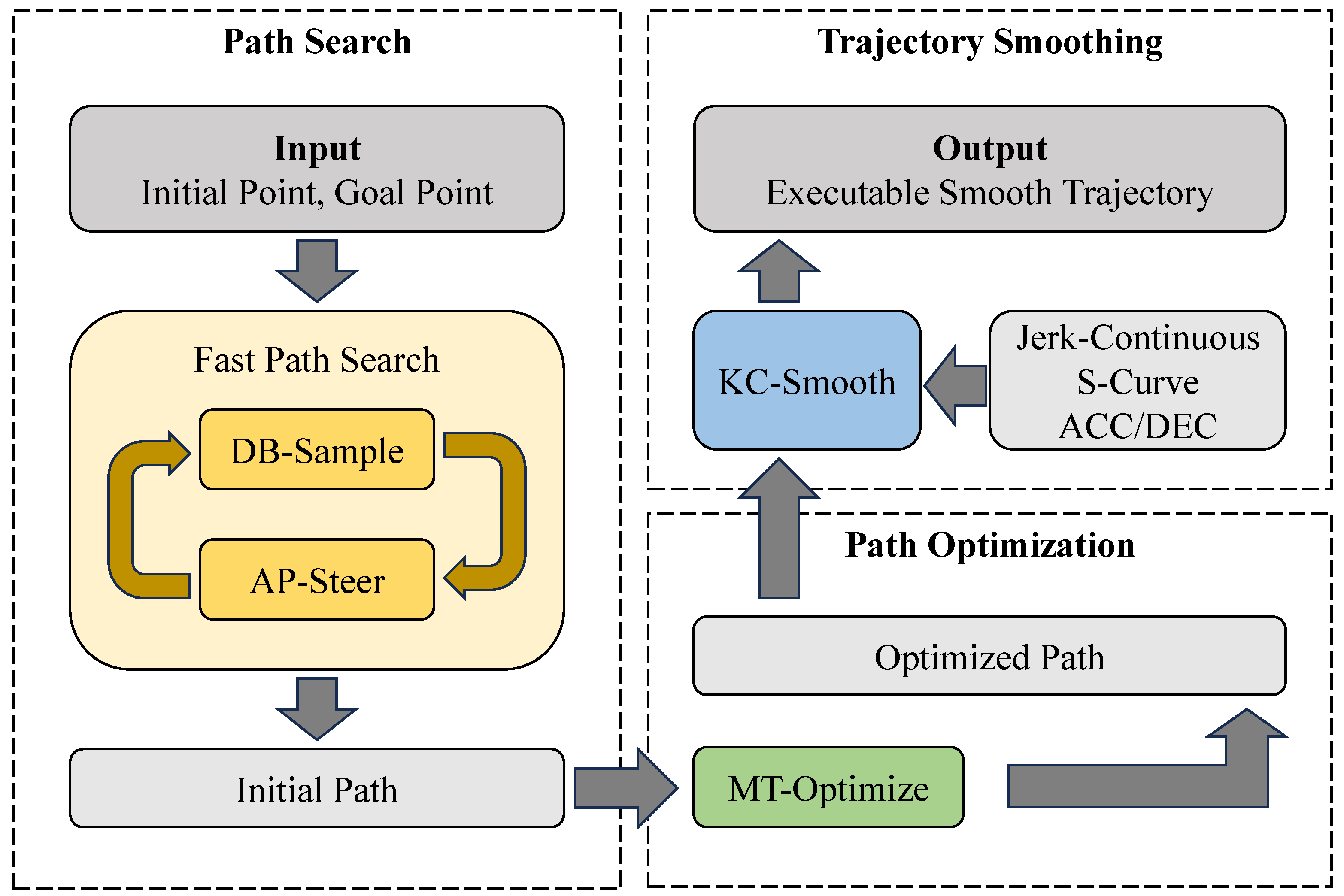
Researchers from Jiangsu University have developed an innovative algorithm, called KSBB-P-RRT*, that allows robotic arms and mobile manipulators to move more efficiently and smoothly in complex environments. The method integrates path planning and motion control into a single, unified system. It improves the speed and precision of robotic movement by combining adaptive sampling, dynamic obstacle avoidance, and smooth trajectory generation. In traditional systems, robots often experience sudden changes in direction or speed, which can cause mechanical stress and reduce accuracy. KSBB-P-RRT* introduces kinematic smoothing based on continuous-jerk motion profiles, reducing vibrations and improving stability. Simulation results show that this new algorithm reduces planning time by more than thirty percent and lowers total motion cost by up to eight percent compared to standard methods, while producing trajectories that comply with real physical constraints. Designed for manipulators operating in irregular environments such as greenhouses, factories, or laboratories, the system optimizes both the computation and the mechanical movement. This enables robots to execute tasks with high precision and minimal energy waste. KSBB-P-RRT* therefore represents a step toward a new generation of intelligent, flexible, and safe automation systems that can adapt dynamically to changing conditions and achieve reliable operation even in demanding applications.