
Fast and Smooth Robotic Path Planning for Real-Time Industrial Applications

1. Executive Summary
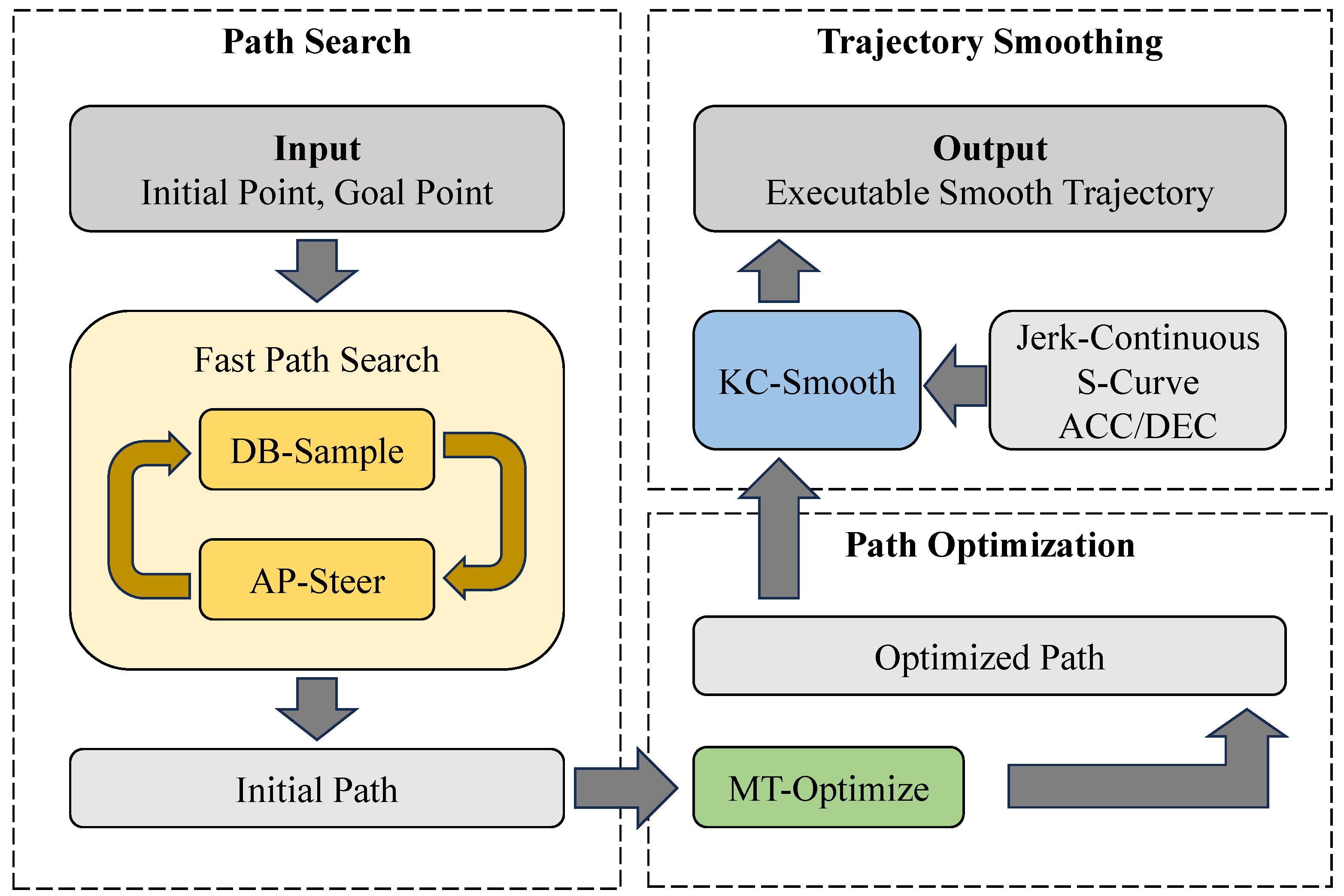
The KSBB-P-RRT* algorithm introduces a fast and kinematically smooth approach to robotic manipulator path planning, integrating motion control with trajectory generation to achieve precise and efficient operation. Developed by researchers at Jiangsu University, the method enhances the widely used Rapidly-exploring Random Tree Star (RRT*) framework by incorporating three key strategies: a dynamically Biased Sampling and Adaptive Steering mechanism for rapid exploration, a Multi-step Triangle Optimization to refine paths, and a Kinematically Constrained Smoothing scheme based on the Jerk-Continuous S-Curve model for smooth and executable motion. Compared with conventional Bi-RRT* and Bias-P-RRT* methods, KSBB-P-RRT* reduces planning time by over 30%, lowers path cost by up to 8%, and decreases the number of required iterations, all while maintaining high accuracy. Its ability to unify path planning and motion control makes it suitable for robotic applications that require both precision and speed, such as automated assembly, agricultural harvesting, and high-precision industrial manipulation.